")
")
")
")

Mikrokopter -Hexakopter - Drone
All'inizio:
Al giorno d'oggi è possibile acquistare un drone quasi ovunque, senza bisogno di assemblaggio o altro, aprire la scatola, inserire la batteria, accenderlo, volare e iniziare a scattare foto o girare un video. Le cose erano diverse quei giorni.
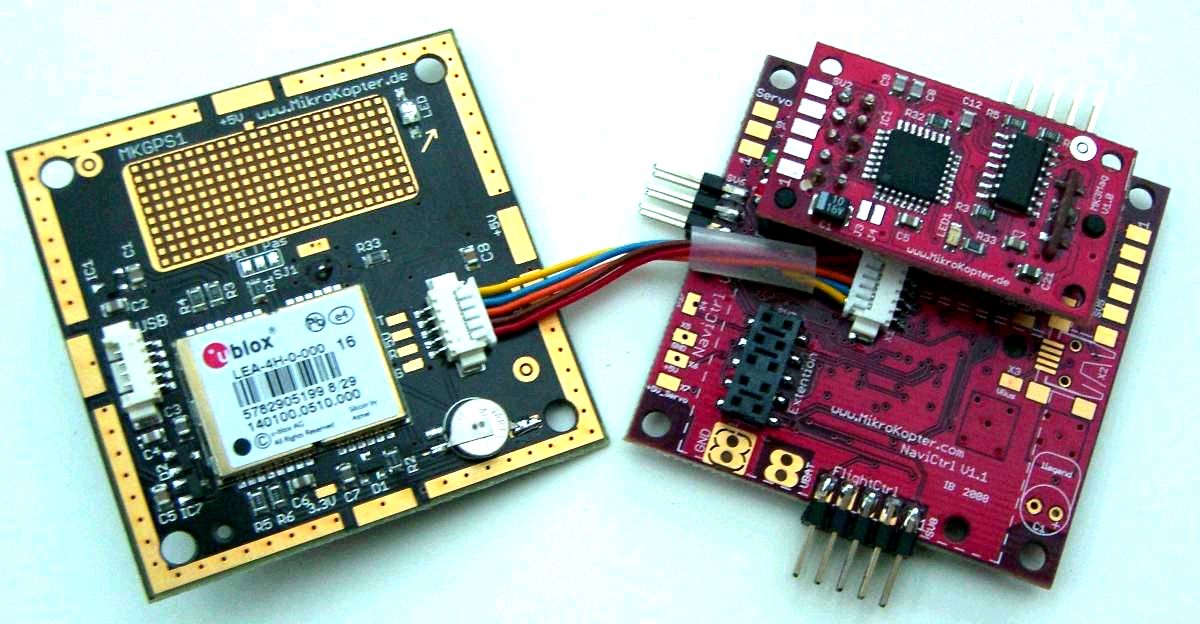
Nell'anno 2008, ho visto alcune belle pagine web tedesche su alcuni dilettanti che avevano sviluppato un drone (Quad, Hexa, Octo) tutti con firmware open source e hardware ben costruito. Esisteva anche un forum (purtroppo scomparso) dove tutta la "Mikrokopter Community" si scambiava le proprie esperienze, con suggerimenti e consigli su come migliorare le prestazioni generali del proprio drone. È stato piuttosto interessante e ho deciso di acquistare uno dei modelli precedenti, un cosiddetto Hexakopter. sì, scritto con la "K" perché è tutto in tedesco. Il pacchetto si presenta come una sorta di progetto fai-da-te, tutte le parti sono lì ma dovevi costruirle e montarle da solo, uno dei primi prodotti IKEA. Quando apri tutto, apparirà in qualche modo così.





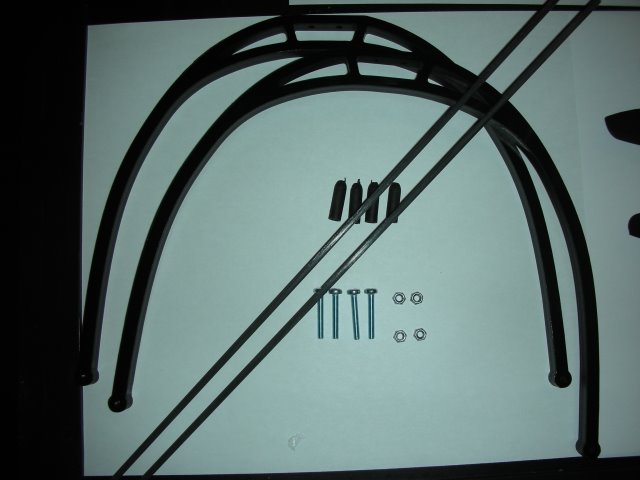


Sul sito Mikrokopter.de c'era una pagina dedicata su come mettere insieme il tutto, era una documentazione molto estesa e non ho riscontrato alcuna difficoltà nel costruire la versione "standard" dell'Hexakopter. Ci sono fondamentalmente tre documenti diversi, il primo riguarda l'elettronica, il PCB e cose del genere. Il secondo tipo è la costruzione meccanica, con tutte le minuscole viti, boccole, dadi, ecc. La terza e più importante parte era il firmware, caricandolo e personalizzandolo per essere utilizzato da un "principiante" come me.
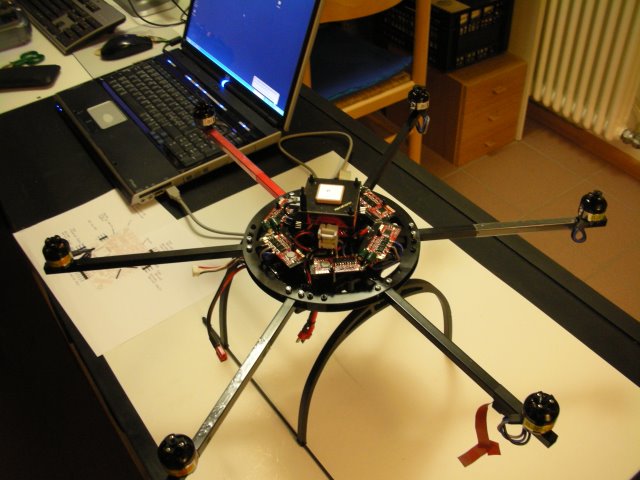
Inizialmente ho continuato a costruire la parte meccanica perché serve una base solida su cui poi posizionare l'elettronica. Ecco alcune immagini del processo.


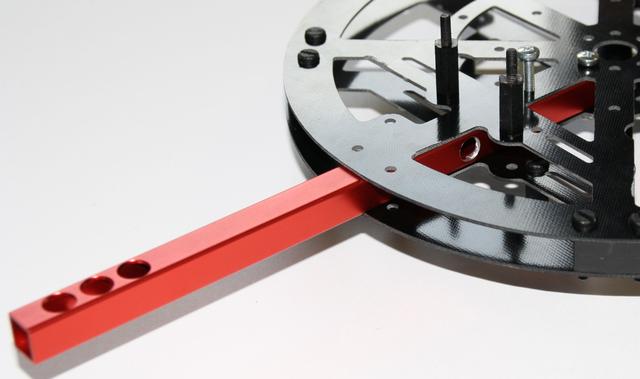
Il profilo in alluminio rosso è la trave principale come supporto motore, il colore rosso, (solo una delle travi) indica la parte anteriore del drone. Gli altri 5 sono neri e sono stati installati successivamente.


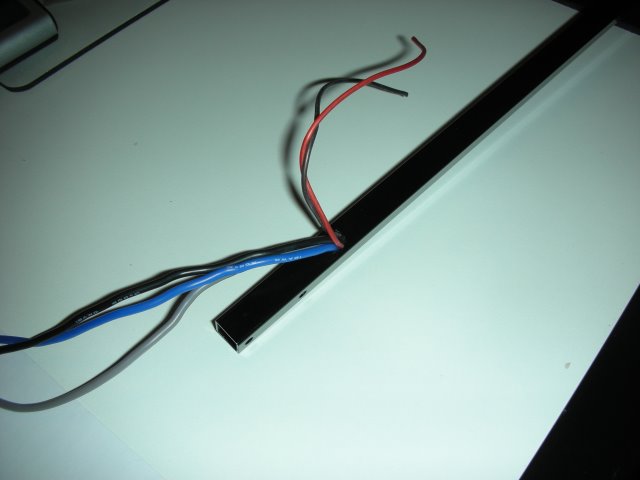
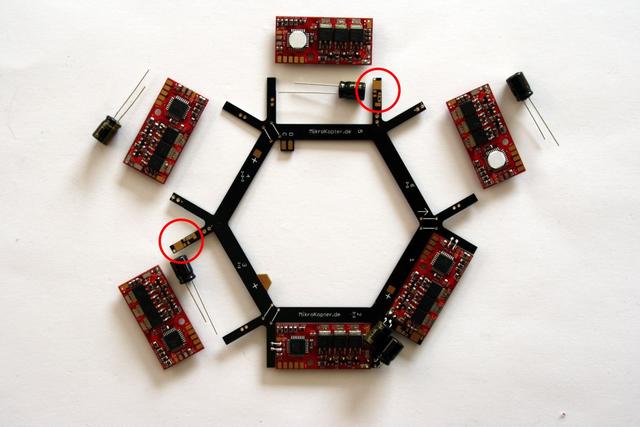
Poi sono stati montati i motori brushless e contemporaneamente ho inserito i fili per le strisce led che verranno montate sotto le travi. Una striscia LED si accenderà sul raggio rosso con LED rossi per vedere l'orientamento del drone in circostanze di scarsa visibilità. Le altre due strisce LED, verdi, erano montate posteriormente. A prima vista, tutti questi cavi e simili sembrano creare un po' di caos, ma gli sviluppatori hanno pensato anche a questo e hanno creato una sorta di disco di distribuzione elettrica in cui tutto si riunisce perfettamente.



.
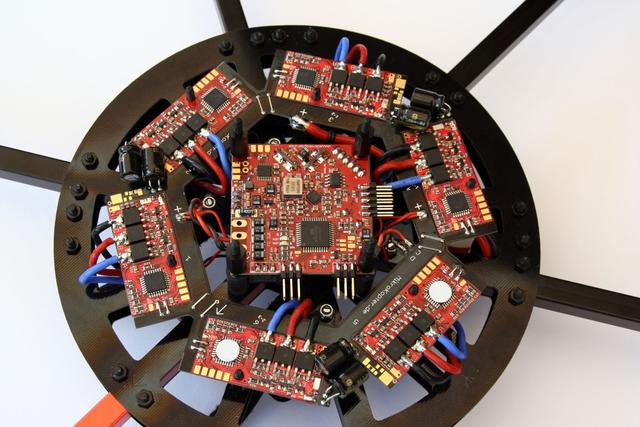
L'esagono di distribuzione con i PCB del driver del motore
Ora le travi. i motori e l'esagono di distribuzione sono finiti, c'è tempo per mettere insieme alcuni componenti elettronici, come i driver del motore, il sistema GPS, il controllore di volo e la parte del ricevitore. È stato un processo lungo e lento passo dopo passo per prevenire errori perché un avvio fumoso sarebbe stato molto costoso.
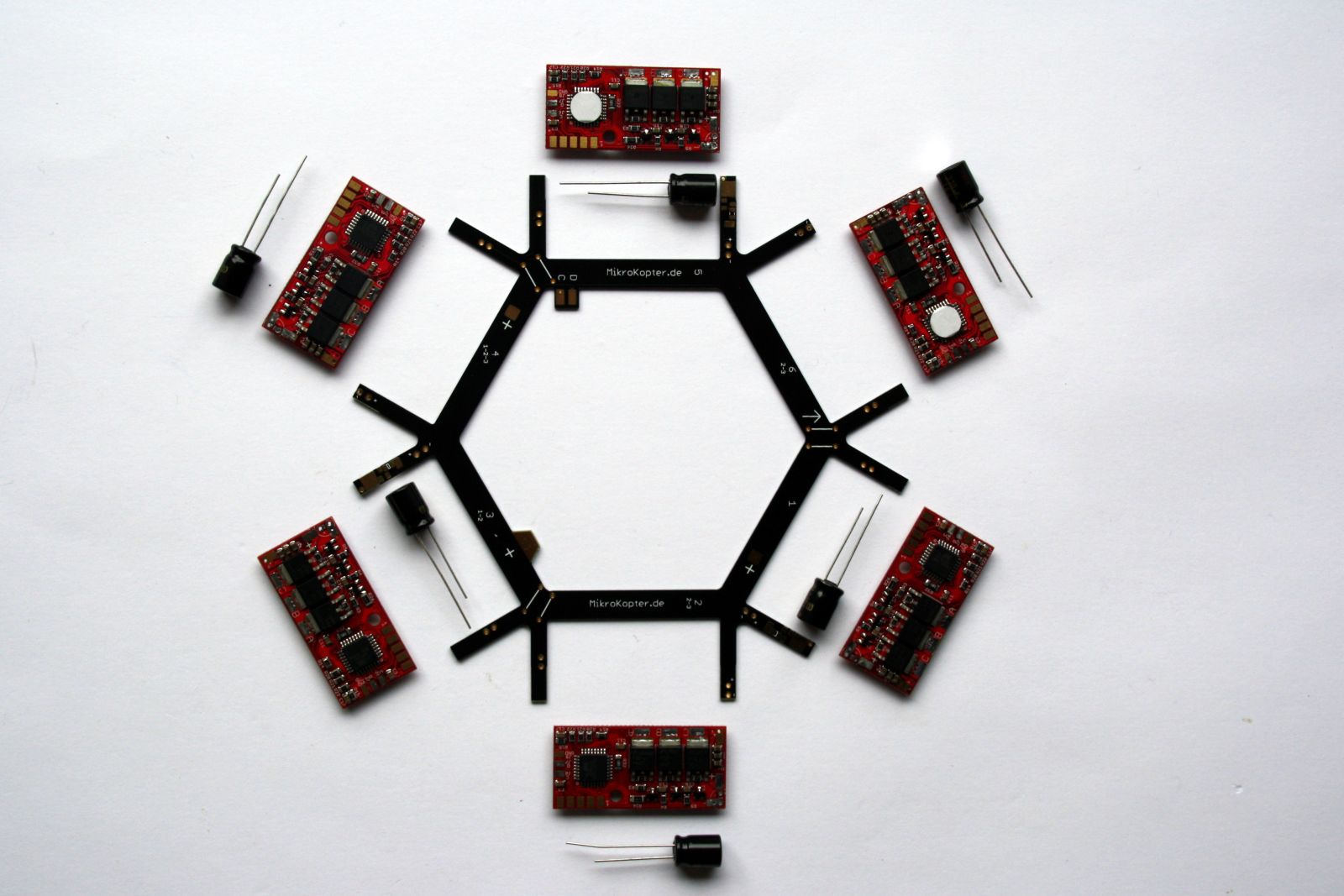
L'esagono di distribuzione con i PCB del driver del motore
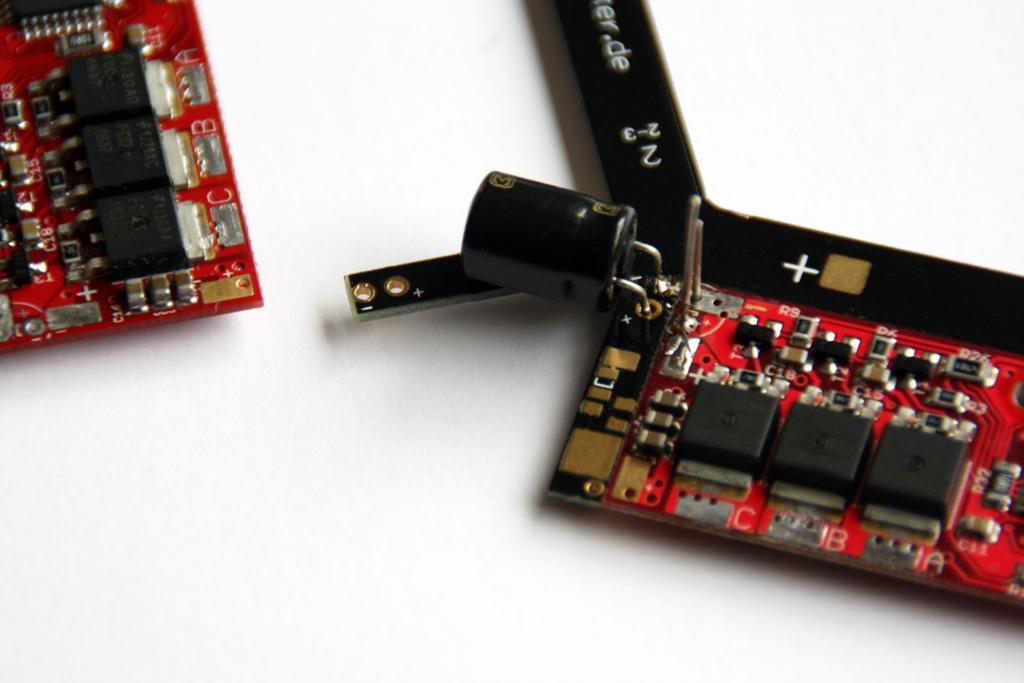
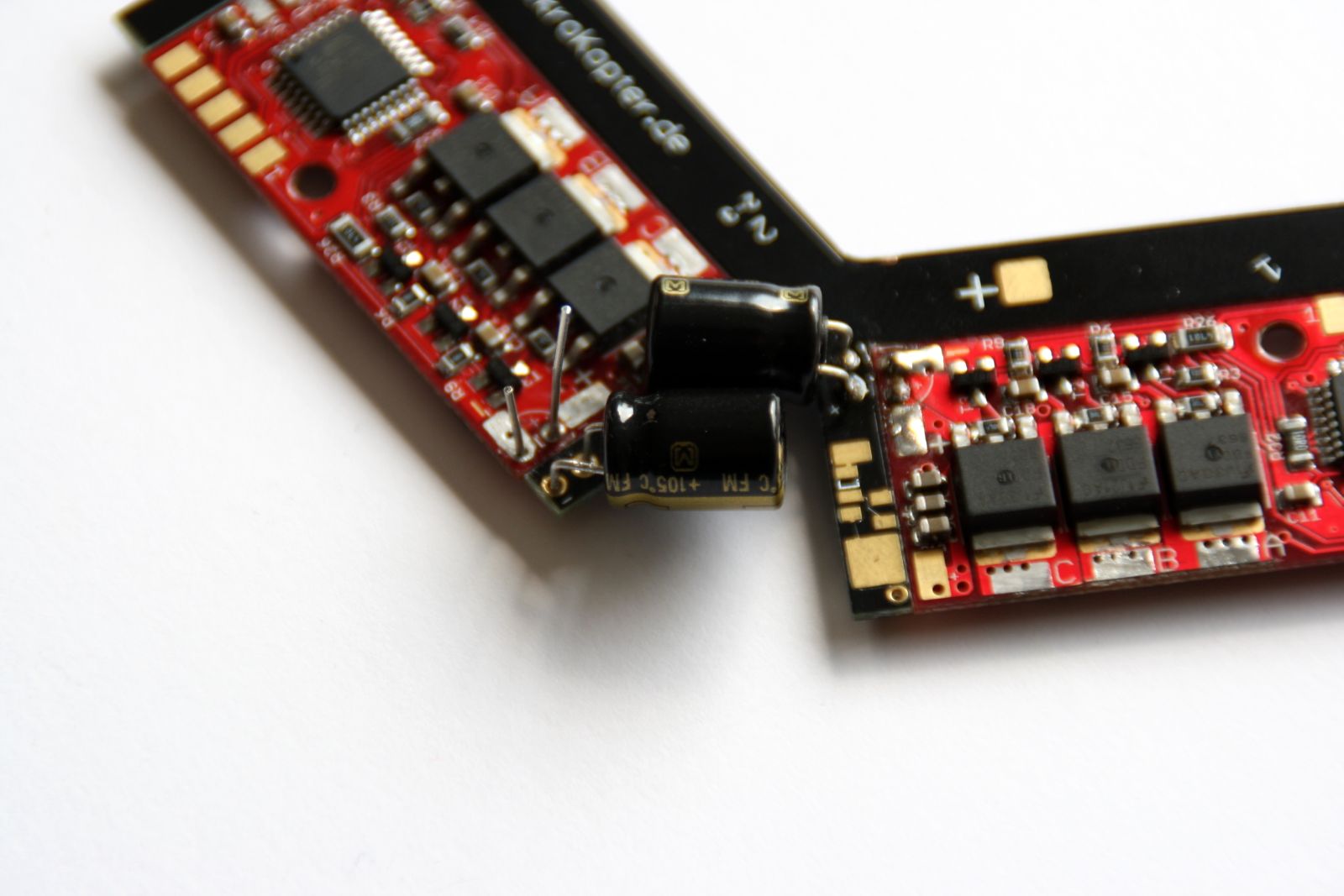
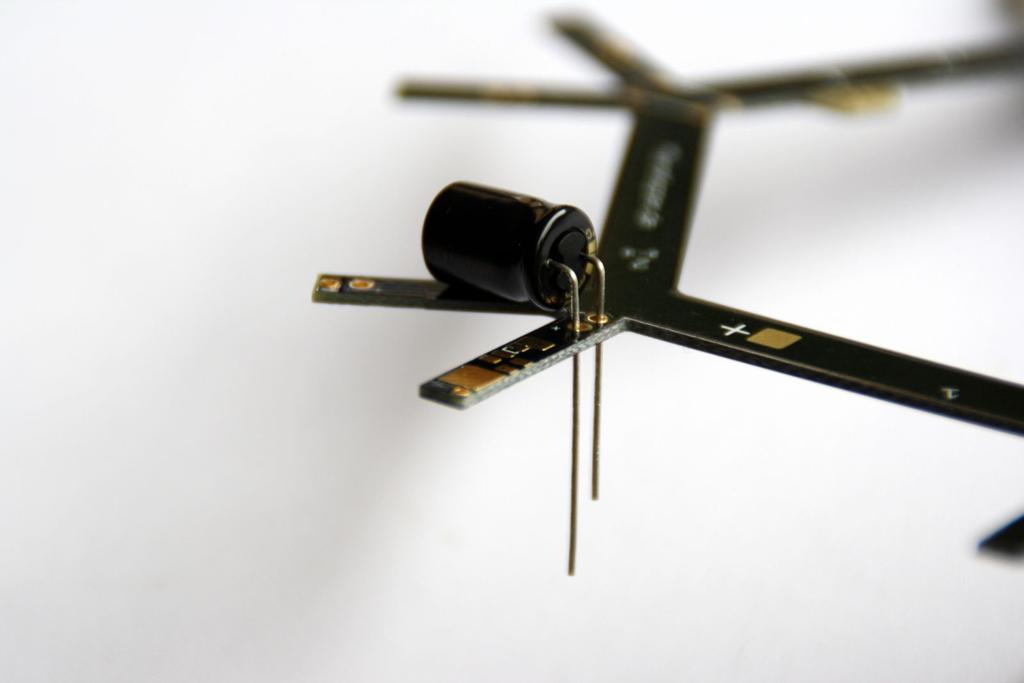
L'esagono di distribuzione con i PCB del driver del motore
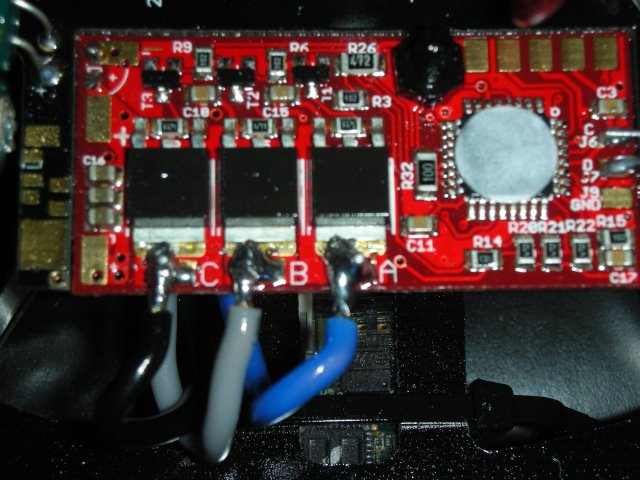
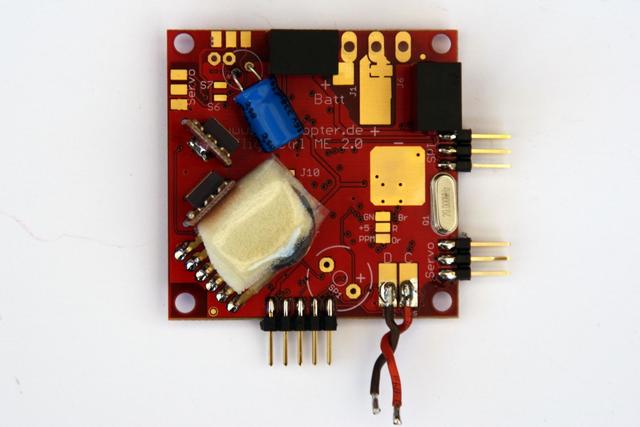
Quindi i PCB del driver del motore sono stati collegati ai motori brushless e il controller di volo è stato saldato insieme, il sensore di altezza è stato avvolto in schiuma di gomma per evitare che il flusso d'aria delle eliche influenzi la reale pressione dell'aria durante le operazioni di volo.
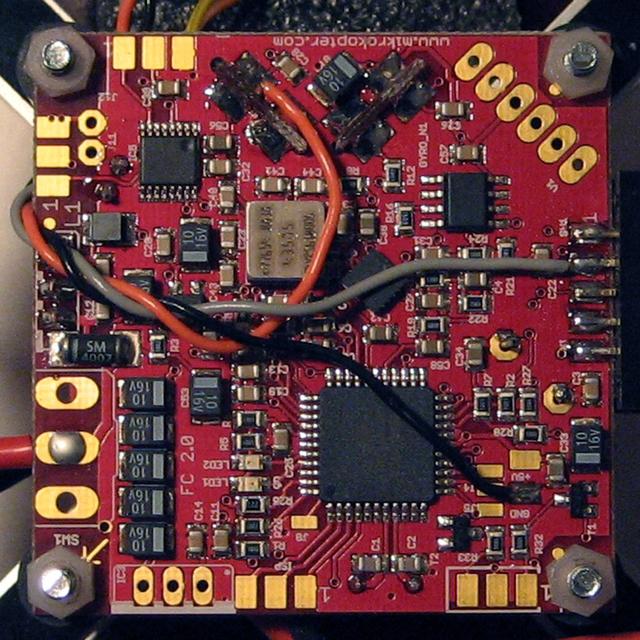
Ora mettiamo insieme tutte le schede PCB in una configurazione a torre. In alto si trova il ricevitore GPS in modo che non ci siano ostacoli per ricevere i segnali satellitari. Questo modulo è costituito dall'antenna e dal ricevitore su un PCB separato.
Poi arriva il controllore di volo, questo modulo è dotato di un sensore di altezza (pressione) per stabilire a quale altezza sta effettivamente volando il drone. Prima del volo, questo sensore dovrebbe essere calibrato alla partenza per evitare letture errate, ad esempio la partenza di una regione montagnosa.
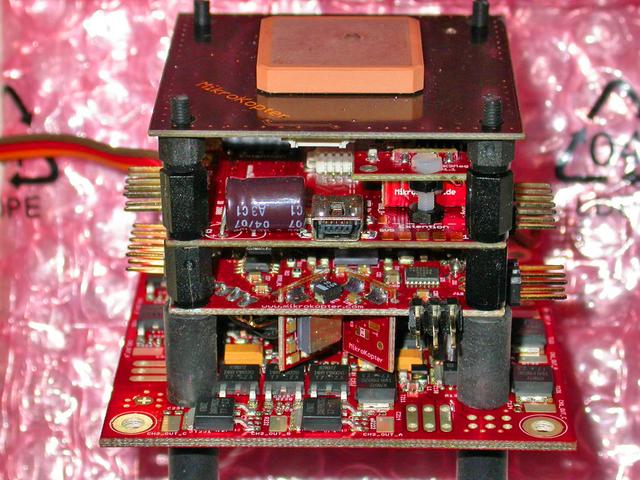
Quindi la torre PCB assemblata può essere posizionata sulla distribuzione esagonale e collegata tra loro con un cavo piatto a 10 pin.
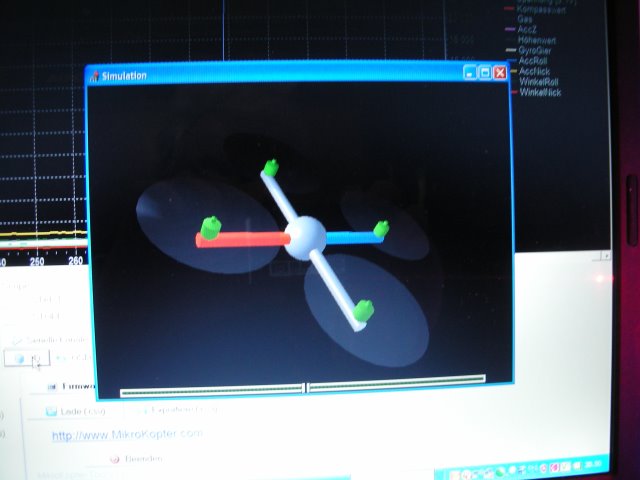
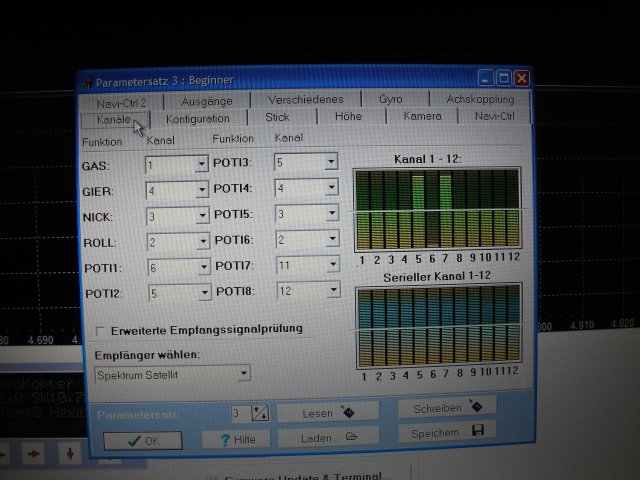
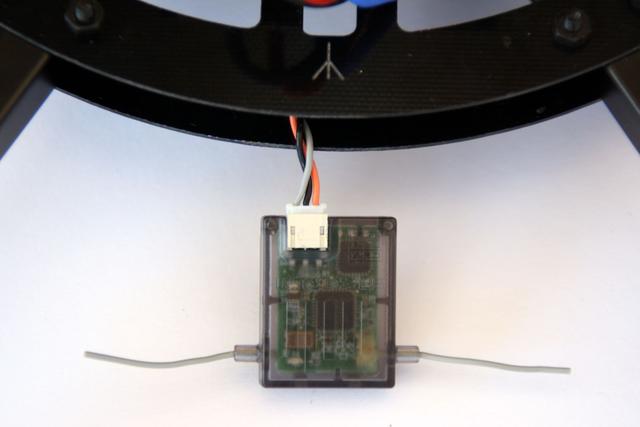
Ora che tutto il gruppo è montato, ho dovuto fare alcuni test per essere sicuro che tutto fosse collegato correttamente e che il controllore di volo funzionasse come dovrebbe. Per fare ciò, il pacchetto Hexakopter viene fornito con un software dedicato che consente di monitorare tutti i tipi di parametri e segnali importanti provenienti dai vari sensori di bordo.


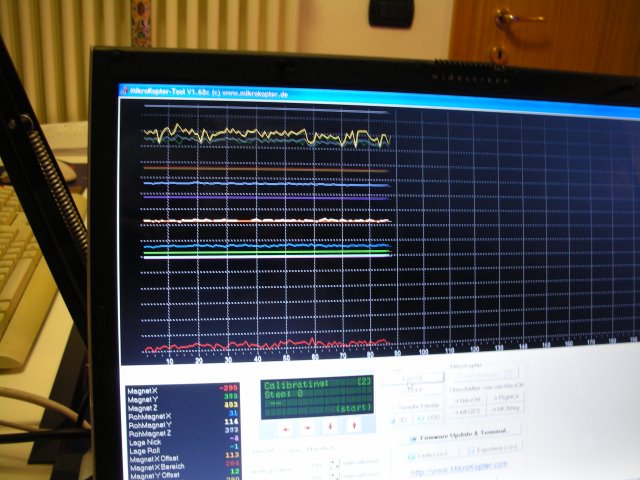
A sinistra il modulo convertiore USB-TTL per la trasmissione dei dati, al centro collegato al controllore di volo del drone, a sinistra i primi segnali dai sensori del drone. Bussola magnetica, pressione, rotta (X, Y, Z, sensori di accelerazione). quali satelliti vengono ricevuti per consentire il volo stazionario automatico in sicurezza, utilizzando i segnali GPS per stabilizzare l'altezza e la posizione X, Y del drone.

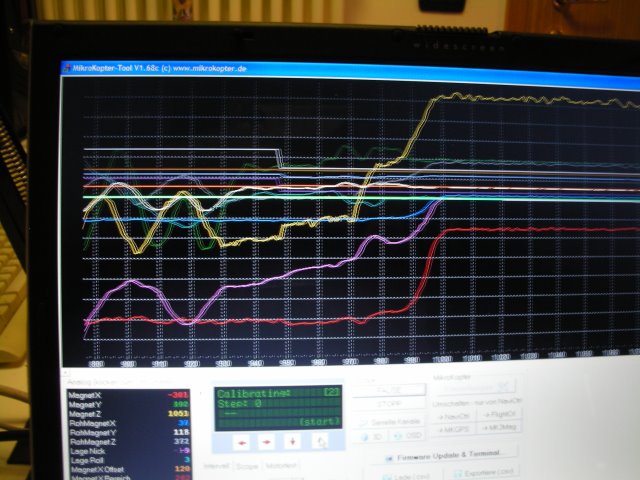
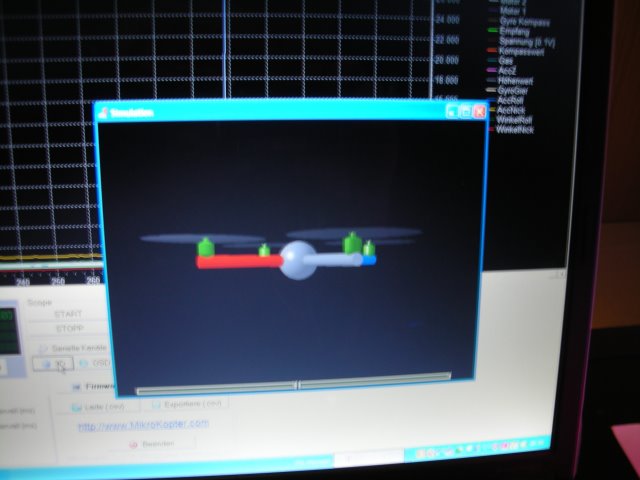
Poiché il primo test è stato eseguito all'interno del seminterrato degli hobby, non erano disponibili segnali satellitari. Ora ho testato i sensori di accelerazione che si occuperanno della corretta posizione durante il volo. Direzione, inclinazione, rotazione e altezza.
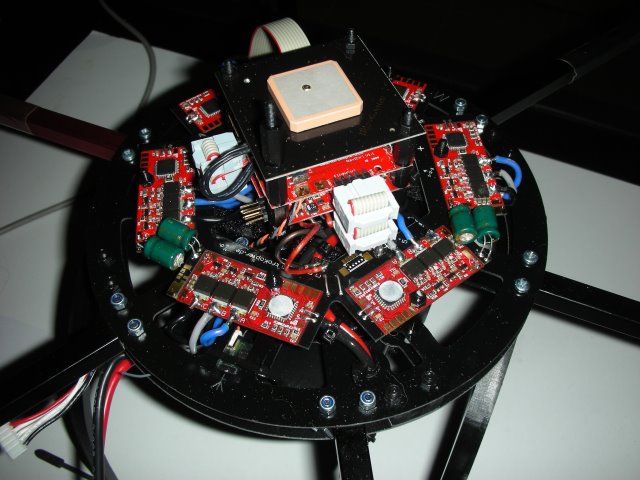
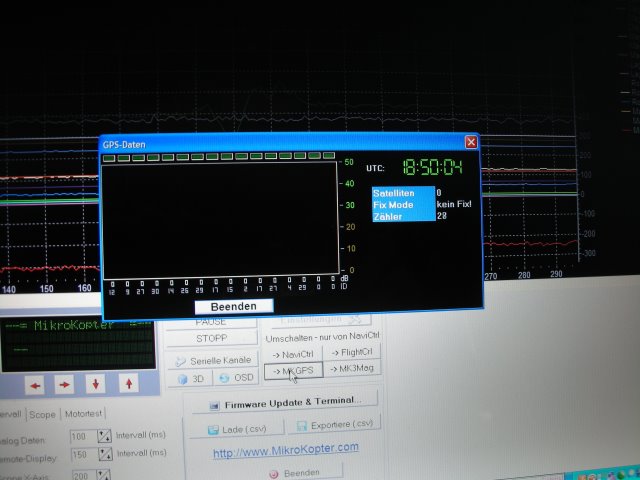
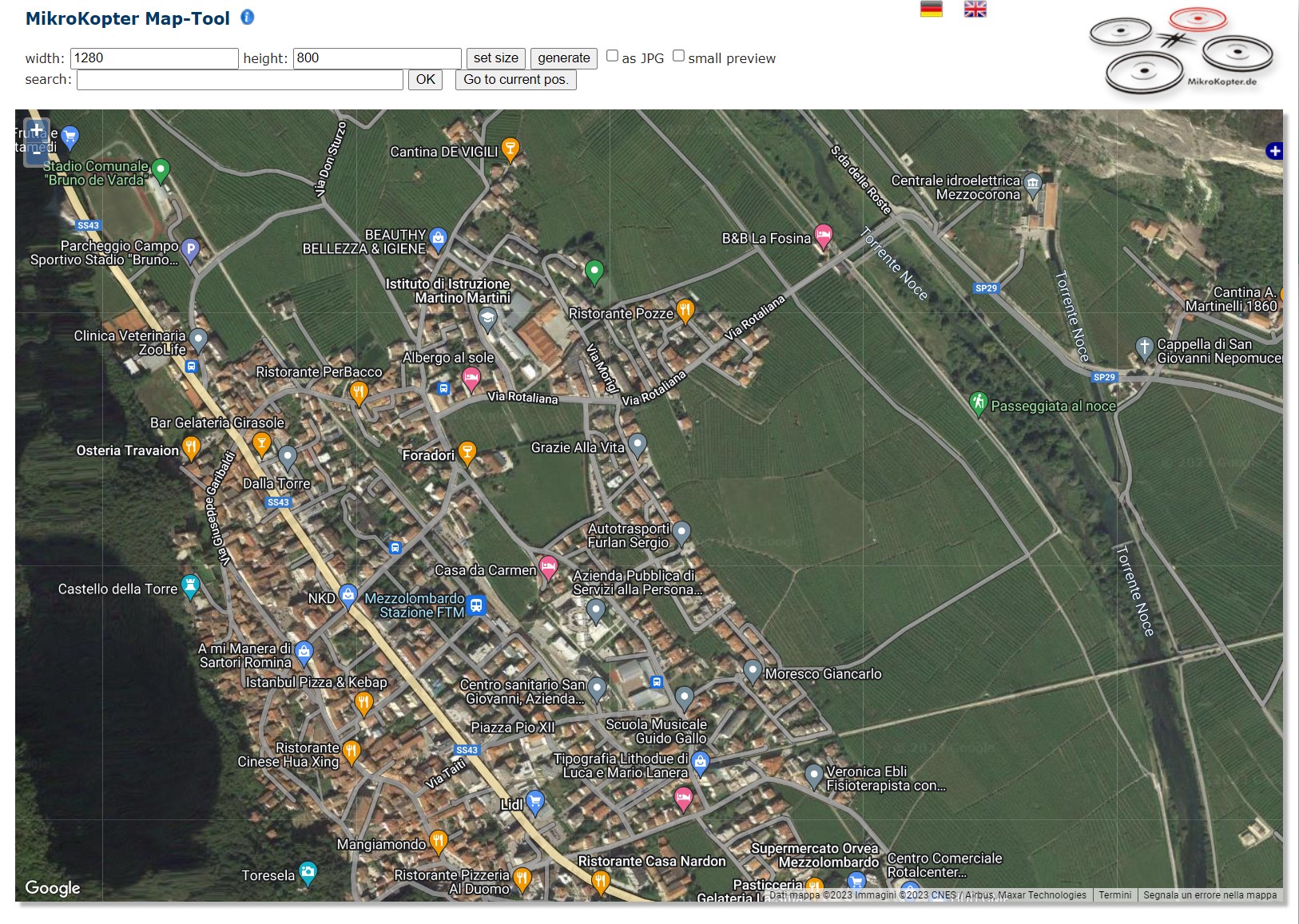
Sono uscito per testare il ricevitore GPS e sono rimasto davvero sorpreso dai buoni risultati del sistema, come puoi vedere qui sopra. Ora che la struttura principale è stata costruita, testata e pronta per il passaggio successivo, ho montato la staffa della fotocamera inclusa nella confezione. Per una piccola fotocamera, come si vede nelle foto, la staffa era abbastanza performante, ma volevo mettere una fotocamera migliore in futuro, quindi ne ho realizzata una mia in resina rinforzata con carbonio, lo vedrai più avanti.



Un drone non può volare autonomamente, quindi ha bisogno di un ricevitore radio e di un telecomando per svolgere il lavoro. Ho acquistato un radiocomando Spektrum con 7 canali perché era la scelta più economica. Questo controller viene fornito con un piccolo ricevitore a 6 canali come mostrato nelle immagini seguenti.





Ora che tutto era pronto per effettuare un primo tentativo di volo, ho impostato una Geo-Mappa per evitare che il drone uscisse da questo specifico raggio d'azione, utilizzando l'opzione " Waypoint " presente nel firmware. Con questa opzione puoi impostare diversi punti (geografici) da cui volare. Grazie alla modalità "spensierata", puoi impostare nel firmware qualunque sia l'orientamento del drone, ruotato o altrimenti, questa opzione controllerà il drone semplicemente spingendo i joystick a destra, a sinistra, avanti o indietro. Il drone si occuperà di interpretare correttamente i comandi, quindi anche un "novizio", come lo ero io in quel momento, non potrebbe causare la perdita o il danneggiamento del drone.



Le nuove restrizioni odierne rendono piuttosto difficile il volo di questo tipo di droni fai-da-te. Spero che il tuo viaggio con questo articolo ti sia piaciuto. Sfortunatamente, il video girato con questo drone è andato perso in un crash del computer. Ma potresti dare un'occhiata al canale degli sviluppatori, ci sono ancora alcuni video rimasti.